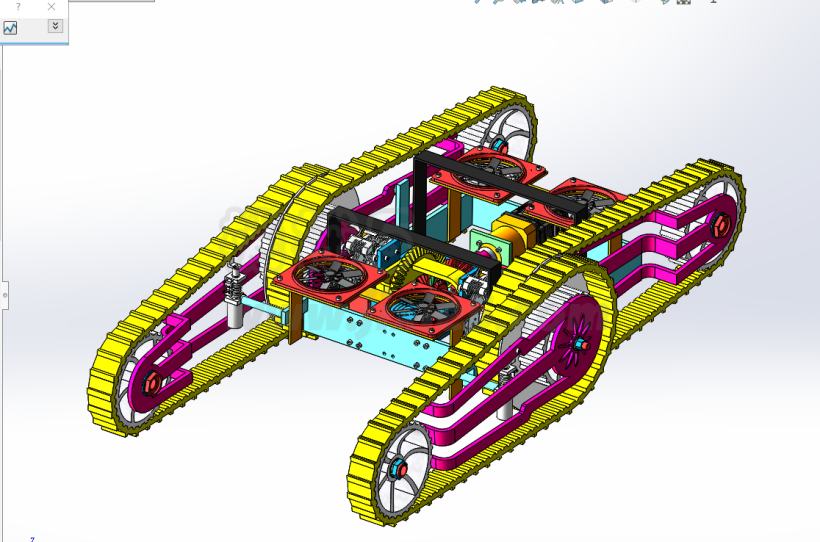
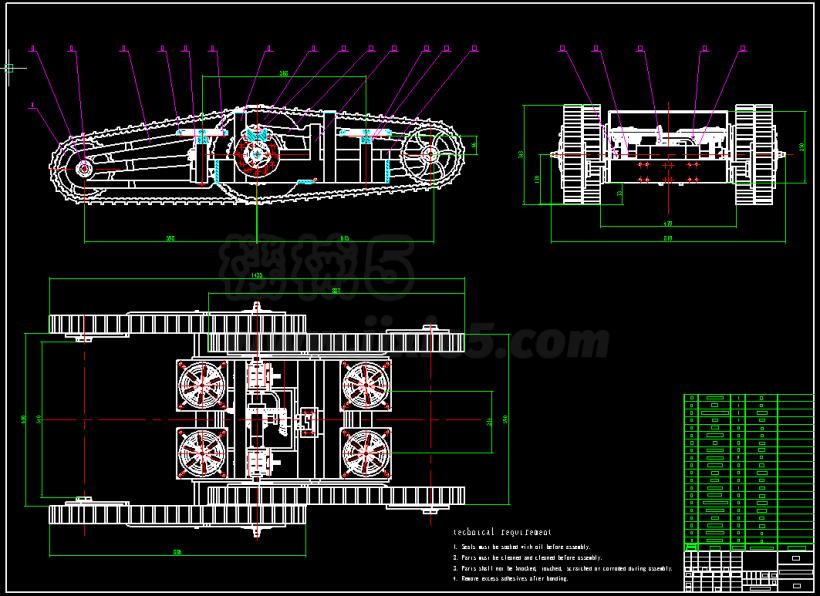
M2427-可变形履带机器人的结构设计[含SW三维图] 下载积分:100 资料编号: M2427


2.填写金额:100
3.添加备注,填写资料编号:
会有专人在15分钟内把资料发到您邮箱
备注:如果付款忘记填写资料编号,则发邮件时附带您的交易明细截图即可。
请耐心等待,如超过30分钟还没收到,请联系客服QQ:2363701252
作品描述
作品包括:
Word版设计说明书1份
CAD版本图纸,共2张
SW三维图一套
摘要
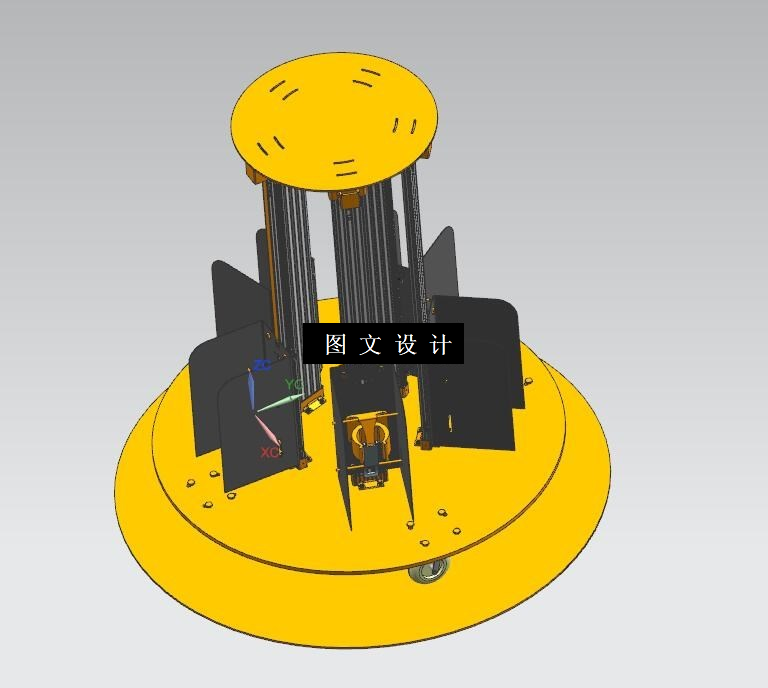
根据现有工厂的实际生产环境,以及如何实现自动化设备的合理使用和布局,设计了多关节自由度的送料机械手的结构,并在锻造中实现了关节式柔性操作和装卸机械手。机械手的基本结构形式是通过关节旋转来实现的。它能在一定空间内达到任意位置,实现对锻件精确装卸的传递功能。通过对本设计的要求和查阅相关设计资料,结合现有市场机械手的设计因素等方面,确定了本设计机械手合理的总体设计方案。在提出的方案中,通过相关技术分析和参数计算,参考相关文献,确定了本设计的锻压机自动送料机械手。臂、指端夹紧锻件等结构参数的标准化设计。在提出的设计方案的基础上,通过对设计结构中重要构件的取样、结构分析、参数化计算和校核,最终确定构件的结构尺寸。
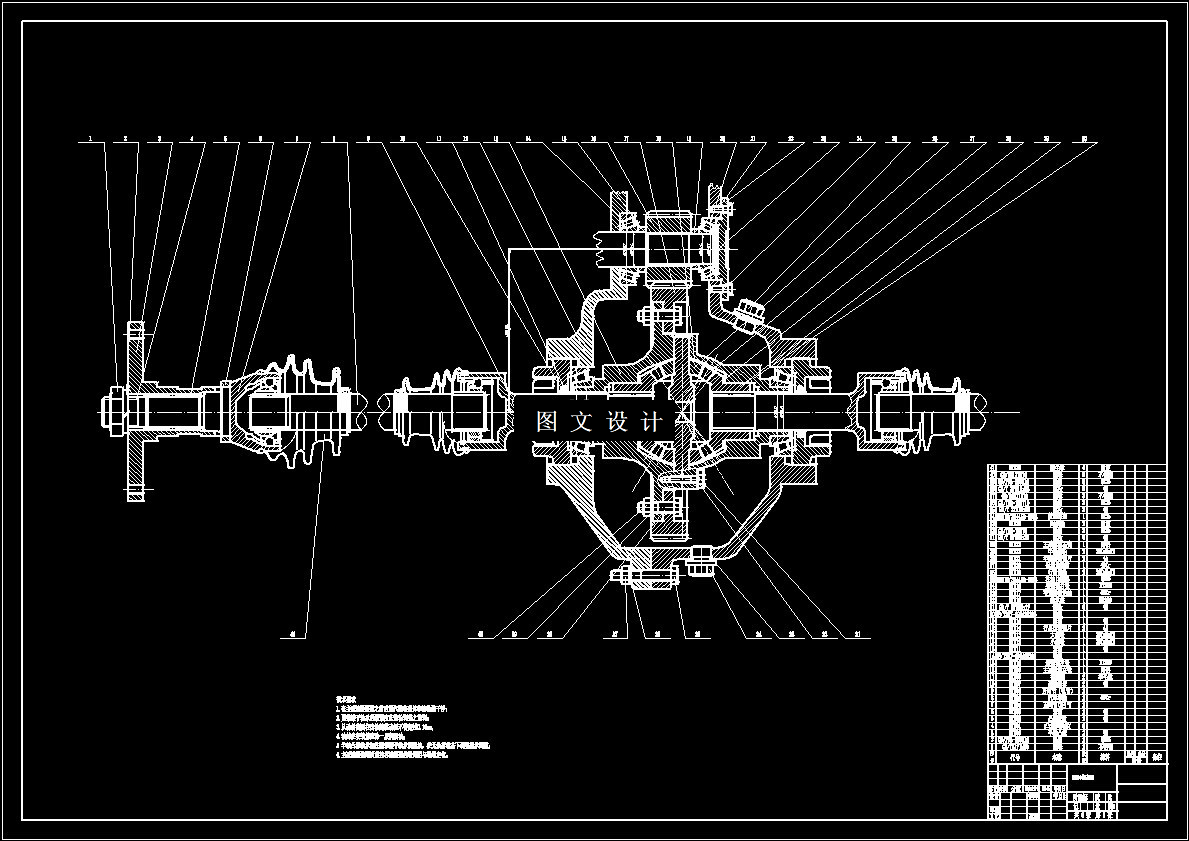
设计中采用SolidWorks软件对机构进行三维造型设计。根据本设计的尺寸,用软件绘制了锻压机自动送料机械手结构设计的实体模型,经推导后绘制出相应的CAD设计结构工程图。从而达到快速、准确传递锻件的目的,最终实现装卸动作。
关键词:关节旋转,机械手,机械手,三维建模
温馨提示:
1、题目前面的备注【字母数字编号】为本站整理分类的编号,与课题内容无关,请选题时忽视;
2、若题目上备注三维,则表示文件里包含三维源文件,由于三维组成零件数量较多,为保证预览截图的简洁性,本站将三维文件夹进行了打包。三维及CAD预览截图,均为本站电脑打开软件进行截图的,保证能够打开,下载原件超高清,下载后解压即可;
3、本站所有资源如无特殊说明,都需要本地电脑安装Office2007。图纸软件为AutoCAD,PROE,UG,SolidWorks,CATIA等;
4、本站所有图文资料仅供用户学习参考,不作为任何商用或其他用途;
5、本站不保证下载资源的准确性、安全性和完整性, 不包修改,不支持退换,同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失;
6、 下载文件中如有侵权或不适当内容,请与我们联系,我们立即纠正。